


Position d'un point d'un solide dans un référentiel
Définition
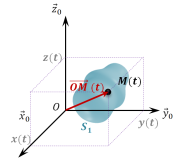
La position d'un point
|  Coordonnées cartésiennes |




On utilise trois paramètres pour définir complètement la position du point
 dans le repère de référence. Ceux-ci dépendent du système de coordonnées dans lequel est exprimé le vecteur position.
dans le repère de référence. Ceux-ci dépendent du système de coordonnées dans lequel est exprimé le vecteur position.
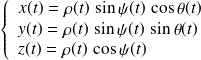
Dans le cas ci-dessus, le vecteur position est exprimé dans un système de coordonnées cartésiennes. les trois paramètres de position sont :
 et
et
 .
.
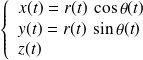
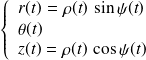
On utilise aussi couramment les systèmes de coordonnées cylindriques et sphériques :

Paramètres du mouvement :
Correspondance avec les coordonnées cartésiennes :
| 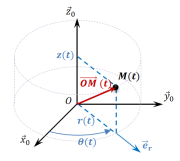 Coordonnées cylindriques |


Paramètres du mouvement :
Correspondance avec les coordonnées cylindriques :
Correspondance avec les coordonnées cartésiennes :
|  Coordonnées sphériques |


Paramétrage d'un mouvement de translation rectiligne
Dans le cas de la translation rectiligne, un seul paramètre géométrique linéaire (variable) est nécessaire pour définir la position d'un solide à tout instant.
Exemple :
Soit
|



Paramétrage d'un mouvement de rotation autour d'un axe fixe
Lorsqu'un solide a un mouvement de rotation, un seul paramètre géométrique angulaire est nécessaire pour définir sa position à tout instant.
Exemple :
Soit
Dans ce cas,
| 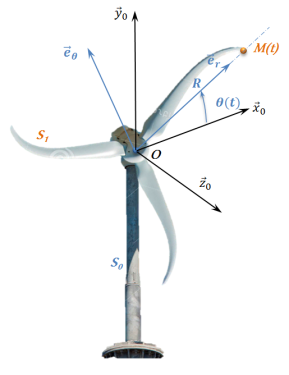 |



Remarque :
La paramètre
 n’apparaît pas explicitement dans l'expression du vecteur position. Celui-ci est présent à travers le vecteur
n’apparaît pas explicitement dans l'expression du vecteur position. Celui-ci est présent à travers le vecteur
 , dont l'orientation dépend directement de cet angle.
, dont l'orientation dépend directement de cet angle.
En fait
positionne la base cylindrique
 en rotation par rapport à la base cartésienne
en rotation par rapport à la base cartésienne
 .
.
On peut alors chercher à exprimer le vecteur position dans la base cartésienne en fonction du paramètre
. Cela fait appel aux notions de changement de base.




