Mouvements et Référentiel d'étude
Définition
La notion de mouvement associe le concept de variation de la position du solide observé à celui d'écoulement du temps. Cette notion est relative : elle n'a de sens que si on définit préalablement le solide dont on étudie le mouvement et le solide de référence par rapport auquel ce mouvement a lieu.
En cinématique, et plus généralement en mécanique, l'étude des mouvements des solides et des points qui les constituent s'effectue dans un référentiel d'étude.
Définition :
Un référentiel d'étude est l'ensemble formé par un repère spatial de référence et un repère temporel :
le repère spatial de référence est défini par un point Origine et une base (généralement orthonormée directe) liée à l'espace d'observation ; On le note par exemple :

le repère temporel est défini par un instant Origine (
 ) et une unité de temps (la seconde).
) et une unité de temps (la seconde).
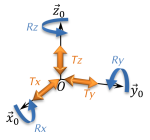
Un fois le référentiel d'étude défini, on associe à chaque solide un repère spatial orthonormé et direct. Etudier les mouvement d'un solide indéformable revient alors à étudier les déplacements du répère associé à ce solide par rapport au repère de référence. Dans un espace en 3 dimensions, il existe 6 mobilités ou degrés de liberté possibles :
|  |




Mouvement de translation
Définition :
On dit qu'un solide
 est en mouvement de translation par rapport au repère de référence
est en mouvement de translation par rapport au repère de référence
 si au cours du mouvement, un repère
si au cours du mouvement, un repère
 lié au solide reste constamment parallèle à lui-même.
lié au solide reste constamment parallèle à lui-même.

Exemple :
Remarque :
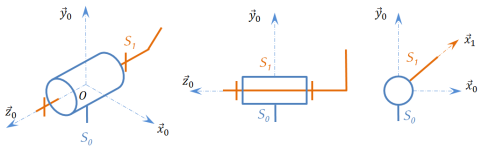
Un mouvement de translation rectiligne (l'origine du repère se déplace le long d'un ligne droite) de direction
 est schématisé par une liaison glissière de direction
, dont le symbole normalisé est :
est schématisé par une liaison glissière de direction
, dont le symbole normalisé est :
Attention :
Un mouvement de translation n'est pas nécessairement rectiligne.
Mouvement de rotation autour d'un axe fixe
Définition :
Le mouvement d'un solide
par rapport au repère de référence
 est une rotation autour d'un axe fixe s'il existe au moins deux points distincts
est une rotation autour d'un axe fixe s'il existe au moins deux points distincts
 et
et
 de
, immobiles par rapport à
au cours du mouvement.
de
, immobiles par rapport à
au cours du mouvement.
La droite
 est appelée axe de rotation. Tous les points de l'axe
appartenant au solide
sont fixes par rapport au repère
.
est appelée axe de rotation. Tous les points de l'axe
appartenant au solide
sont fixes par rapport au repère
.
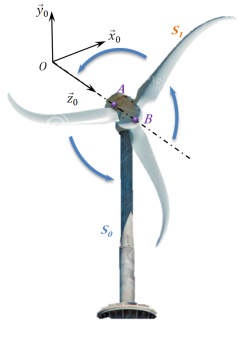
Exemple :
Remarque :
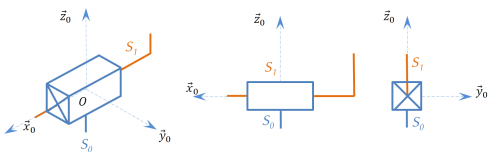
Un mouvement de rotation autour d'un axe
 entre deux solides
entre deux solides
 et
et
 est schématisé par une liaison pivot d'axe
est schématisé par une liaison pivot d'axe
 dont le symbole normalisé est :
dont le symbole normalisé est :